
An anonymized Japanese family restaurant chain shows how service robots can move beyond novelty by connecting ordering, kitchen delivery, table notification, dish return, and washroom handoff into one practical workflow.
June 2026 | 10 min read
Customer confidentiality note: The restaurant operator in this article is not named. It is described only by region, format, scale, and scenario: a leading Japanese Italian-style family restaurant chain under a major domestic foodservice group, with nearly 200 locations.
Restaurant dish return automation works best when the robot is treated as part of the restaurant operating system, not as a standalone tray carrier. In a large anonymized deployment in Japan, a full-service Italian-style family restaurant chain uses KettyBot Pro robots across kitchen, dining-room, and dishwashing-area routes. The robots support kitchen-to-table delivery, table-to-dishwashing dish return, ordering-tablet notifications, and tablet-based robot calls. The chain has deployed more than 400 units, averaging 6.8 robots per store, with up to 15 robots in a high-volume location.
The lesson for restaurant operators is straightforward: scalable robot deployment depends less on the robot’s appearance and more on route density, system integration, tray sensing, exception handling, and staff acceptance. When those pieces are designed together, robots can support service teams by reducing repetitive walking and creating a more predictable flow between guests, tables, kitchens, and wash areas.
Why Japan is a proving ground for restaurant automation
Japan is one of the clearest markets for service robotics because the operating pressure is structural. The country has a large elderly population, a tight service labor market, and many restaurant formats built around consistent, high-frequency service. For full-service restaurants, hiring enough people for a shift is only part of the problem. Managers also need trained staff to spend enough time on guest-facing service when so much of the day is consumed by walking, carrying, waiting, and returning used dishes.
Government and institutional sources point to the same direction. The Statistics Bureau of Japan tracks the country’s aging population through its official elderly-population statistics. Japan’s Ministry of Health, Labour and Welfare has also emphasized labor-supply constraints in its labour economy analysis. The OECD’s 2025 report on artificial intelligence and Japan’s labor market frames AI and automation as part of a broader response to demographic change, workforce transition, and productivity pressure.
For restaurant chains, this context changes the automation question. “Can a robot replace a server?” is the wrong frame. A better question is: which repetitive routes keep staff away from guest-facing service, and can those routes become predictable, system-triggered workflows?
The anonymized deployment: from robot trial to multi-store operating model
The deployment discussed here involves a leading Japanese Italian-style family restaurant chain with nearly 200 locations. The operator uses Pudu Robotics’ KettyBot Pro in full-service restaurant environments, especially across three zones: the kitchen, the dining area, and the dishwashing area.
The scale is notable:
| Deployment metric | Anonymized project data |
| Cumulative robots deployed | 400+ units |
| Average robot density | 6.8 robots per store |
| Highest robot density in one store | 15 robots |
| Main zones covered | Kitchen, tables, dishwashing area |
| Main workflows | Kitchen-to-table delivery and table-to-dishwashing dish return |
Table 1 – Anonymized deployment scale and workflow coverage.
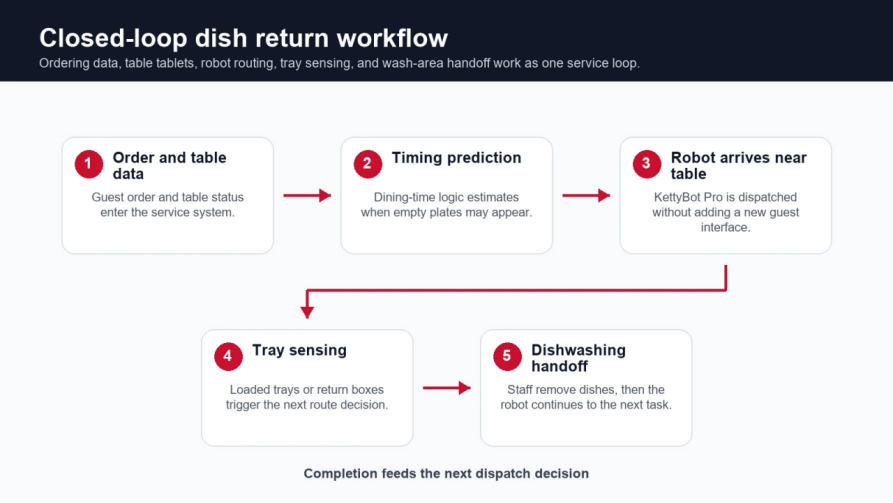
Figure 1 – The anonymized deployment scale suggests a multi-robot operating model rather than a one-unit pilot.
This is more than a one-robot pilot placed near the entrance for attention. A 6.8-robot average suggests a different operating logic: the robot fleet is being sized around repeated service routes inside the store. The high-end example of 15 robots in one location also signals that larger restaurants may need fleet orchestration, not simply “one robot per store.”
For buyers, this matters because restaurant robot programs often stall when they are evaluated as device purchases. A robot can look impressive during a demo and still underperform in a real dining room. A scalable deployment needs store mapping, route frequency analysis, order-system integration, staff task redesign, and a clear view of when a robot should move, wait, return, charge, or accept the next task.
The core workflow: closed-loop dish return
Dish return is often more operationally sensitive than it first appears. Empty plates accumulate at different times. Tables vary by party size, menu type, and dining duration. Staff may be busy with seating, ordering, serving, payments, or customer requests. A dish-return robot adds value only when it fits the rhythm of the restaurant instead of interrupting it.
In this deployment, the robot workflow is connected with the restaurant’s ordering and table systems. The operating model can be summarized in six steps:
| Step | What happens | Why it matters |
| 1. Order data enters the system | Guests place orders through the restaurant’s ordering system or table tablet. | The robot workflow starts from service data, not a manual guess. |
| 2. The system estimates dish-return timing | Based on expected per-person dining time, the system predicts when empty plates may appear. | Dish return becomes proactive rather than purely reactive. |
| 3. The robot is routed to the table area | KettyBot Pro arrives near the table at an appropriate point in the meal. | Staff do not need to constantly patrol for empty plates. |
| 4. The table tablet can notify guests or call the robot | Guests may receive a tablet-side reminder, and the tablet can also call a robot. | The touchpoint stays familiar: the table tablet, not a complicated robot interface. |
| 5. The robot detects loaded trays | When empty plates are placed on the robot tray or return area, sensing helps confirm that the robot is ready to move. | The system can close the loop without staff repeatedly checking the robot. |
| 6. The robot goes to the dishwashing area | Once dishes are removed by wash-area staff, the robot detects the change and can continue to the next dish-return task. | The workflow links table clearing with back-of-house processing. |
Table 2 – Closed-loop dish return workflow.

Figure 2 – A closed-loop dish return workflow connects ordering data, table touchpoints, robot routing, tray sensing, and wash-area handoff.
The workflow is not “hands-free” in the literal sense. Guests still place plates on the robot, and staff still handle dishwashing. The value comes from automating routine movement, routing, and task sequencing around the existing restaurant process. Diners use the ordering tablet and familiar service cues instead of learning a separate robot interface.
Why integration matters more than a standalone robot
Many restaurant robot projects begin with a simple question: “Can the robot carry food?” Carrying is necessary, but it is not sufficient. In a full-service restaurant, the robot must fit into a network of decisions:
– Which order is ready?
– Which table should receive a delivery notification?
– Which tables are likely to have empty plates?
– Which robot is closest and available?
– Which path avoids congestion?
– Which dishwashing-area handoff is ready?
– What happens when a guest does not load the tray?
– What happens when the tray is not unloaded?
This is where platform integration becomes important. Pudu Robotics’ Open Platform materials describe third-party integration with systems such as POS and ERP, with example scenarios including multi-table delivery and dish collection. For a restaurant chain, that openness matters because every store already has digital systems: ordering tablets, POS terminals, kitchen display systems, store-management dashboards, and reporting workflows.
In the anonymized Japan deployment, tablet integration changes the guest and staff experience. The tablet can notify diners when the robot arrives. The tablet can call the robot when a table needs support. The robot can then route based on system context, rather than depending only on someone pressing a button on the robot body.
That difference sounds small, but it is often the difference between a novelty and an operating model. In a busy dining room, staff will adopt a robot faster when it removes steps rather than adding new ones.
Why KettyBot Pro fits this scenario
Figure 3 – KettyBot-style service robots support tray-based movement in hospitality and dining-room environments.
KettyBot Pro is positioned by Pudu Robotics as a flexible multitasker in commercial delivery. Official product materials highlight multiple delivery modes, smart tray detection, automatic recharging, an 18.5-inch display, and superior mobility. Pudu Robotics Academy materials add useful deployment details for restaurant buyers: KettyBot Pro supports visual plus laser-based SLAM navigation, 55 cm trafficability, tray detection, and configurations that include two trays and one dish-return box.
Those details matter in a restaurant for practical reasons:
– Narrow aisles require mobility and path reliability.
– Dining rooms need predictable obstacle avoidance around guests and staff.
– Dish return needs tray or return-box status detection in addition to point-to-point routing.
– Multi-robot stores need automatic charging and task continuity.
– Table-area communication should be understandable without turning the robot into the main interface.
The restaurant in this case uses KettyBot Pro across both delivery and dish-return workflows. Food moves from the kitchen to tables, while used dishes move from tables to the dishwashing area. The robot supports a circulation pattern that mirrors how work actually flows through a restaurant.
What a 6.8-robot average tells buyers about fleet sizing
Restaurant operators often ask whether one robot is enough. The honest answer is: it depends on route density, table count, aisle layout, meal period intensity, and whether the robot is used for both delivery and dish return.
The anonymized deployment’s average of 6.8 robots per store suggests that multi-robot operation can be necessary when automation becomes part of the workflow rather than a small pilot. A restaurant that uses robots for lunch delivery only may need a very different fleet from a restaurant that uses robots throughout the day for food delivery, empty-plate return, and dishwashing-area handoff.
Fleet sizing should be based on operating questions:
| Fleet-sizing question | What to measure |
| How many high-frequency routes exist? | Kitchen-to-table distance, table-to-dishwashing distance, and route repetitions per meal period. |
| When do route peaks occur? | Lunch, dinner, weekend, holidays, and promotion periods. |
| How long does one task cycle take? | Dispatch, travel, loading or unloading, return route, and waiting time. |
| Can tasks be batched? | Multi-table delivery, dish-return grouping, and tray capacity. |
| Where will robots wait or charge? | Staging space, charging location, and traffic impact. |
| Which tasks should remain human-led? | Guest service, exception handling, payment issues, spills, special requests, and customer reassurance. |
Table 3 – Fleet-sizing questions for restaurant operators.
The store with 15 robots is especially useful as a signal. High-volume stores need orchestration. More robots can increase capacity, but only if routes, staging, dispatch rules, and traffic behavior are planned carefully. Otherwise, the restaurant simply replaces human congestion with robot congestion.
The staff experience: less walking, more service control
The strongest restaurant automation deployments are not framed as humans versus machines. They are built around staff support. In this case, the robot fleet helps handle repetitive physical movement between kitchen, dining room, and dishwashing area. Staff still own hospitality, exceptions, cleaning quality, kitchen coordination, and guest judgment.
That distinction matters. In a full-service family restaurant, guest experience depends on warmth, timing, and confidence. Robots can carry trays, return dishes, and follow repeatable routes, but the service team still decides how to respond to a child spilling a drink, an elderly guest needing help, a delayed dish, or a table asking for recommendations.
By shifting routine movement to robots, the restaurant can reduce avoidable walking pressure on staff. That can support more stable service during labor-constrained shifts and peak periods. It can also make daily work feel more organized: instead of reacting to every empty plate manually, staff can rely on a system that helps bring dish-return capacity to the table area at the right time.
What restaurant chains should evaluate before deployment
For restaurant operators considering service robots, the key lesson from this Japan deployment is to evaluate workflow readiness before buying hardware. A good pilot should answer operational questions that go beyond navigation.
| Evaluation area | Good sign | Risk sign |
| Workflow clarity | Delivery and dish-return routes are mapped by zone and time period. | Robot tasks are described vaguely as “helping staff.” |
| System integration | Ordering tablet, POS, or store system can trigger or support robot tasks. | Staff must manage every route directly on the robot. |
| Guest touchpoint | Guests use familiar table tablets or simple cues. | Guests must learn a new robot interface. |
| Staff adoption | Robots remove walking and routine checks from staff workflows. | Robots create extra monitoring work. |
| Fleet sizing | Robot count is based on route frequency and peak-hour task cycles. | One demo robot is used to estimate an entire rollout. |
| Exception handling | Staff know what to do when a table is blocked, tray is not loaded, or dishes are not removed. | Exceptions are discovered only after rollout. |
| Multi-store governance | Layout templates, dispatch rules, training, and service processes can scale. | Each store reinvents the deployment method. |
Table 4 – Restaurant robot deployment evaluation checklist.
This is also why a restaurant group should involve operations and IT together from the beginning. Operations knows where work is repetitive. IT knows how the ordering, POS, and tablet systems can trigger tasks or send notifications. Procurement can then evaluate robots against actual workflow requirements instead of surface-level feature lists.
From delivery robot to restaurant automation layer
The term “robot waiter” can be useful for casual explanation, but it is too narrow for serious restaurant planning. The more accurate concept is an integrated restaurant automation layer. That layer includes delivery robots, dish-return workflows, table notifications, staff calls, fleet dispatch, charging, reporting, and exception management.
Pudu Robotics’ Food & Beverage solution materials describe restaurant scenarios across food delivery, dish return, cleaning, and guest reception. The broader direction is clear: restaurant automation is moving from single-task robots toward connected workflows that support the whole service environment.
The Japan deployment reflects that shift. The robot is part of a coordinated flow:
– Kitchen output connects to table delivery.
– Dining progress connects to expected dish-return timing.
– Table tablets connect to notifications and robot calls.
– Tray sensing connects to dishwashing-area routing.
– Dish removal connects to the next task.
That is the operational story. The chain is turning repetitive service routes into a repeatable system.
FAQ: restaurant dish return robots
What is restaurant dish return automation?
Restaurant dish return automation uses service robots and digital systems to help move used dishes from table areas to dishwashing or back-of-house areas. In more advanced workflows, the robot is connected with ordering tablets, POS data, table notifications, tray sensing, and dispatch rules so that dish return can happen at the right time with less manual checking.
How is dish return different from food delivery?
Food delivery usually starts when kitchen items are ready. Dish return is more variable because it depends on guest dining time, table size, menu type, and staff availability. A scalable dish-return workflow needs sensing, timing logic, and a clear handoff with the dishwashing area.
Why does ordering-tablet integration matter?
Ordering-tablet integration keeps the guest touchpoint familiar. The tablet can notify diners, call a robot, or coordinate with table status. This reduces reliance on staff pressing controls directly on the robot and makes the robot part of the restaurant’s normal digital workflow.
How many robots does a restaurant need?
There is no universal number. Fleet size should be based on table count, route distance, task frequency, peak-hour demand, tray capacity, charging time, and whether robots support both food delivery and dish return. In the anonymized Japan deployment, the chain averages 6.8 robots per store, with up to 15 in one high-volume location.
Do dish return robots replace staff?
No. The practical role of dish return robots is to support service teams by handling repetitive movement and routing. Staff remain essential for hospitality, exceptions, guest care, cleaning judgment, kitchen coordination, and dishwashing-area work.
What should restaurant chains test in a pilot?
A pilot should test route completion, tablet integration, tray loading and unloading behavior, traffic flow, guest acceptance, staff adoption, charging rhythm, and exception handling. It should also estimate how the model changes when scaled from one robot to several robots per store.
Conclusion: the future of restaurant robots is workflow-first
The most important lesson from this anonymized Japan deployment is that restaurant robotics becomes powerful when it stops being a device conversation and becomes a workflow conversation. The chain’s use of more than 400 KettyBot Pro units, with an average of 6.8 robots per store, shows that service robots can become part of daily full-service restaurant operations when they are connected to ordering systems, table notifications, dish-return sensing, and back-of-house handoffs.
For restaurant operators facing labor pressure, the opportunity is to give teams a more reliable operating system for repetitive movement, so staff can spend more attention where human service matters most.
The next step for restaurant chains is to map the work before choosing the fleet: kitchen-to-table routes, table-to-wash-area routes, tablet touchpoints, tray capacity, peak-hour cycles, and exception paths. Once those are clear, robot deployment can be planned around the real rhythm of the restaurant.
References & Further Reading
1. Statistics Bureau of Japan, “Statistics from the Viewpoint of Our Elderly.” https://www.stat.go.jp/data/topics/topi1420.html
2. Ministry of Health, Labour and Welfare, “2024 Analysis of the Labour Economy.” https://www.mhlw.go.jp/stf/wp/hakusyo/roudou/24/2.html
3. OECD, “Artificial Intelligence and the Labour Market in Japan.” https://www.oecd.org/content/dam/oecd/en/publications/reports/2025/11/artificial-intelligence-and-the-labour-market-in-japan_a67a343c/b825563e-en.pdf
4. Pudu Robotics, KettyBot Pro. https://www.pudurobotics.com/en/products/kettybot_pro
5. Pudu Robotics Academy, KettyBot Pro product introduction. https://academy.pudutech.com/en/docs/chan-pin-jian-jie-hu-lu-pro
6. Pudu Robotics, Food & Beverage solution. https://www.pudurobotics.com/en/solutions/food-and-beverage
7. Pudu Robotics, Open Platform news release. https://www.pudurobotics.com/en/news/pudu-robotics-launches-open-platform
8. Pudu Robotics, “One-Stop Restaurant Automation: Integrating Robot Waiters, Delivery Robots, and Cleaning Robots.” https://www.pudurobotics.com/en/news/restaurant-automation-robot-waiters